Sujet :
Code pour une voile solaire [Demande d'aide]
1

Et le probleme est?
Lire la suite >
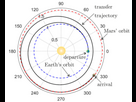
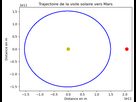
Le problème c'est qu'en exécutant le code, il affiche quelque chose de statique qui ne bouge pas, c'est-à-dire cela 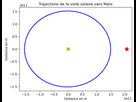 au lieu de m'afficher quelque chose qui ressemblerait un peu plus à cela
au lieu de m'afficher quelque chose qui ressemblerait un peu plus à cela 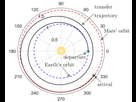 avec la ligne noire quittant la Terre qui se dessinerait progressivement jusqu'à atteindre le point représentant Mars.
avec la ligne noire quittant la Terre qui se dessinerait progressivement jusqu'à atteindre le point représentant Mars.
Lire la suite >
Voici une bibliothèque de mécanique spatiale :
"""module keplerien bib_mclk, simplifiée en mk
period(a,mu) retourne la periode en seconde
kepler(anomM,e):equation de kepler, donnée anomalie moyenne, resultat anomalie excentrique
keplerv(anomM,e):en radian equation de kepler, donnée anomalie moyenne, résultat anomalie vraie
invkepler(anomEx,e):equation de kepler inverse, donnée anomalie excentrique, résultat anomalie moyenne
invkeplerv(v,e): # en rd equation de kepler inverse,on donne l'anomalie vraie, résultat anomalie moyenne
kepCar(orb,mu):passe des kepleriens (a,e,i,pom,gom,v) aux cartésiens . dist en km, angles en rd
carKep(pos,vit,mu):passage cartésien aux képlériens. Dist en km, angles en degré
extrapk (orb, ddatef,mu): #en rd ,date en seconde calcule l'anomalie vraie à la date +ddatef
gaussk(orbk,mu):matrice de gauss parametre képleriens
lamb(R1,R2,temps,mu)vecteur en majus, scalaire en minus, unité km et sec, methode lancaster limité aux ellipses et à moins d'un tour
"""
import math
import bib_math as mth
import numpy as np
import numpy.linalg as npl
"""ce module travaille sur une orbite képlérienne à 3 dimensions
il extrapole, calcule position, vitesse"""
mus = 1.327124e11 # km3/s2
def period(a,mu):
"""retourne la periode en seconde"""
per = 2*np.pi*math.sqrt(a*a*a/mu);
return per
def kepler(anomM,e):
"""equation de kepler, donnée anomalie moyenne, resultat anomalie excentrique"""
sinM = math.sin(anomM)
cosM = math.cos(anomM)
if (anomM ==0) or (anomM==np.pi):
return anomM
if (e==0):
return anomM
if (e<1):
alpha = math.pow(math.pi,3)*e/np.pi;
Z = e*sinM/math.sqrt(e*e+1-2*e*cosM);
E0 = anomM+Z-Z*Z*Z*Z*cosM/(6*sinM*(1-e*e));
if(E0<=0.7):
E0 = anomM
else:
E0 = np.cbrt(anomM/alpha)
for n in range(6):
sE0 = math.sin(E0)
f = anomM-E0+e*sE0
fp = e*math.cos(E0)-1
anomEx = E0-f/fp
delta = f/fp
E0 = anomEx
if (e>1):
alpha = (-math.pi+math.pow(math.pi,3)*e)/math.pi
E0 = math.cbrt(anomM*6/e)
for n in range(6):
sE0 = math.sinh(E0)
f = anomM+E0-e*sE0
fp = -e*math.cosh(E0)+1
fpp = -selfe*sE0
anomEx = E0- f/fp
delta = f/fp
E0 = anomEx
return E0
def keplerv(anomM,e): # en radian
"""equation de kepler, donnée anomalie moyenne, résultat anomalie vraie"""
anomEx = kepler(anomM,e);
if (e<=1):
anomv = mth.angle(math.cos(anomEx)-e,math.sqrt(1-e*e)*math.sin(anomEx))
if (e>=1):
anomv = mth.angle(e-math.cosh(anomEx),math.sqrt(e*e-1)*math.sinh(anomEx))
return anomv;
def invkepler(anomEx,e):
"""equation de kepler inverse, donnée anomalie excentrique, résultat anomalie moyenne"""
if( e<=1):
anomM = anomEx-e*math.sin(anomEx);
if (e>=1):
anomM =-anomEx + e*math.sinh(anomEx)
return anomM;
def invkeplerv(v,e): # en rd
"""equation de kepler inverse, donnée anomalie vraie, résultat anomalie moyenne"""
"""angle en rd M fonction de v et ex"""
cosehf = math.cos(v)+e
sinehf =math.sqrt(abs(1-e*e))*math.sin(v)
if (e<1):
anomEx = mth.angle(cosehf,sinehf);
anomM = anomEx-e*math.sin(anomEx);
if (e>1):
anomEx = math.atanh(sinehf/cosehf);
anomM = e*math.sin(anomEx)-anomEx;
return anomM
def kepCar(orb,mu):
"""passe des kepleriens (a,e,i,pom,gom,v) aux cartésiens . dist en km, angles en rd """
#indépendant de v
cpom = math.cos(orb[3])
spom = math.sin(orb[3])
cgom = math.cos(orb[4])
sgom = math.sin(orb[4])
cosv = math.cos(orb[5])
sinv = math.sin(orb[5])
ci = math.cos(orb[2])
si = math.sin(orb[2])
P = [cpom*cgom-sgom*spom*ci,cpom*sgom+spom*cgom*ci,spom*si]
Q = [-spom*cgom-cpom*sgom*ci,-spom*sgom+cpom*cgom*ci,cpom*si]
p = orb[0] * (1 - orb[1] * orb[1]); #parametre p
#dépend de v
r = p / (1 + orb[1] *cosv);
racmusp = math.sqrt(mu/p);
F = r*cosv
G = r*sinv;
pos = [0,0,0]
for i in range(3):
pos[i] = F*P[i] + G*Q[i]
FP = -racmusp*sinv
GP = racmusp*(orb[1]+cosv);
vit = [0,0,0]
for i in range(3):
vit[i] = FP*P[i] + GP*Q[i]
return pos,vit
def carKep(pos,vit,mu):
#print("type pos",type(pos))
"""passage cartésien aux képlériens. Dist en km, angles en degré"""
pos = np.array(pos)
#print("type pos",type(pos))
vit = np.array(vit)
orb = [0,0,0,0,0,0];
r = npl.norm(pos,2)
v = npl.norm(vit,2)
#print("r,v",r,v)
rv = np.dot(pos,vit)
#print("rv ",rv)
h = np.cross(pos,vit)
hn = npl.norm(h)
# print("h,hn ",h,hn)
unsa = 2/r-v*v/mu;
if (unsa<=0):
print("parabole")
return
p = hn*hn/mu;
#print("p,mu ",p,mu)
racpsmu = math.sqrt(p/mu);
racmup = math.sqrt(mu*p);
eCv = p/r-1;
eSv = rv*racpsmu/r;
#print("eCv,eSv",eCv,eSv)
e2 = max(eCv*eCv+eSv*eSv,1e-18);
#print("e2",e2)
orb[5] = mth.angle(eCv,eSv); #en rd
U = [0,0,0]
V = [0,0,0]
for i in range(3):
U[i] = pos[i]/r
V[i] = (r*vit[i]-rv*U[i])/racmup
#print("U, V ",U,V)
l = mth.angle(U[0]+V[1], U[1]-V[0]);
#print("l ",l*mth.crd)
pompv = mth.crd*mth.angle(V[2], U[2]); #en degré
#print("pompv ",pompv*mth.crd)
si2 = U[2]*U[2]+V[2]*V[2]
orb[2] = math.asin(math.sqrt(si2))
#print("si2,orb[2]",si2,orb[2])
if orb[2]<=1e-10:
orb[4] = 0
pompv = l
else:
orb[4] = (l-pompv+2*np.pi)%(2*np.pi)
orb[1] = math.sqrt(e2)
if orb[1]<1e-10:
orb[3] = 0
orb[5] = pompv
else:
orb[3] = (pompv-orb[5]+4*np.pi)%(2*np.pi)
#orb[2] = pompv-orb[3] # en rd
orb[0] = 1/unsa;
return orb;
def extrapk (orb, ddatef,mu): #en rd ,date en seconde
"""calcule l'anomalie vraie à la date +ddatef en jours julien j2000. """
result = orb[5];
if (ddatef == 0):
return result
v=orb[5] #en rd"
minitial = invkeplerv(v,orb[1]); #M iniial en rd
mn = math.sqrt(mu/math.pow(orbkep[0],3))# en rd/seconde
mfinal = (minitial+mn*ddatef)%(2*np.pi);# M final en rd
result = keplerv(mfinal,orb[1]);#v final tout en rd
# print("\nv, minitial, mn, mfinal, result",v, minitial, mn, mfinal, result)
return result; # en rd
def gaussk(orbk,mu):
"""matrice de gauss parametre képleriens"""
matgauss = np.zeros((6,3))
sinv = math.sin(orbk[5])
cosv = math.cos(orbk[5]);
cosu = math.cos(orbk[5]+orbk[3])
sinu = math.sin(orbk[5]+orbk[3])
tgi = math.tan(orbk[2])
p = orbk[0]*(1-orbk[1]*orbk[1])
racmup = math.sqrt(mu*p)
racpsmu = math.sqrt(p/mu);
r = p/(1+orbk[1]*cosv);
matgauss[0][0] = 2*orbk[0]*orbk[0]*orbk[1]*sinv/racmup;
matgauss[0][1] = 2*orbk[0]*orbk[0]*racpsmu/r
matgauss[1][0] = sinv*racpsmu;
aux = (orbk[1]+cosv)/(1+orbk[1]*cosv);
matgauss[1][1] = racpsmu*(cosv+aux);
matgauss[2][2] = r*cosu/racmup
matgauss[3][0] = -racpsmu*cosv/orbk[1];
matgauss[3][1] = racpsmu*sinv*(1+r/p)/orbk[1];
matgauss[3][2] = -r*sinu/(racmup*tgi);
matgauss[4][2] = r*sinu/(math.sin(orbk[2])*racmup)
matgauss[5][0] = - matgauss[3][0];
matgauss[5][1] = - matgauss[3][1];
matgauss[5][2] = 0;
matgauss[6][0] = racmup/(r*r);
return matgauss
def jul2000(date):
"""passe de la date civile aux jours julien ancien, wiki"""
Y = +date[2];
M = +date[1];
D = +date[0];
if (M<3):
M = M+12
Y = Y-1
S = math.trunc(Y/100);
B = 2-S+math.trunc(S/4);
JJ = math.trunc(365.25*(Y+4716))+math.trunc(30.6001*(M+1))+D+B-1524-2451545;
return JJ;
def cal2000(JJ):
"""passe des jours julien à la date civile jour, mois, année, heure//Wikipedia"""
date = [0,0,0];
JJ+=2451545;
Z = math.trunc(JJ);
F = JJ-Z;
a = math.trunc((Z-1867216.25)/36524.25);
S = Z+1+a-math.trunc(a/4);
B = S+1524;
C = math.trunc((B-122.1)/365.25);
D = math.trunc(365.25*C);
E = math.trunc((B-D)/30.6001);
date[0] = B-D-math.trunc(30.6001*E)+F;
if(E<13.5):
date[1] = E-1
else:
date[1] =E-13
if(date[1]>2):
date[2] = C-4716
else:
date[2] = C-4715
return date;
def lamb(R1,R2,temps,mu):
"""vecteur en majus, scalaire en minus, unité km et sec"""
""" methode lancaster limité aux ellipses et à moins d'un tour"""
def lancaster(q,x):
"""x<1 ellipse"""
K = q*q;"""K=1-c/s"""
E = x*x-1;"""E<0, ellipse"""
y = math.sqrt(-E);
z = math.sqrt(1+K*E);
l = mth.angle(x*z-q*E,y*(z-q*x));"""limité à un tour"""
t = 2*(x-q*z-l/y)/E;
dtsdx = (4-4*q*K*x/z-3*x*t)/E;
return t,dtsdx,y,z
code = 0;"""tout c'est bien passé"""
R1=np.array(R1)
R1é=np.array(R2)
c = npl.norm(R2-R1);
r1 = npl.norm(R1);"""aux.v;"""
Ir1 = R1/r1;"""aux.U;"""
r2 = npl.norm(R2);
Ir2 = R2/r2;
#print("c,r1,Ir1,r2,Ir2",c,r1,Ir1,r2,Ir2)
s = (r1+r2+c)*0.5;"""//demi-périmetre"""
T=math.sqrt(8*mu/s)*temps/s; """//temps normalisé"""
IIh = np.cross(Ir1,Ir2);
h = npl.norm(IIh);
Ih = IIh/h;
#print("s,T,IIh,h,Ih",s,T,IIh,h,Ih)
teta = mth.angle(np.dot(Ir1,Ir2),h); """//cos(teta),sin(teta)"""
#print("teta",teta);
ctetas2 = M=math.cos(teta*0.5);
q = math.sqrt(r1*r2)*ctetas2/s;
if (Ih[2]<0):
q =-q;
aux = np.cross(Ir1,Ih);
It1 = aux/npl.norm(aux);
aux = np.cross(Ir2,Ih);
It2 = aux/npl.norm(aux);
else:
aux = np.cross(Ih,Ir1)
It1 =aux/npl.norm(aux);
aux = np.cross(Ih,Ir2)
It2 = aux/npl.norm(aux);
"""approximation de la fonction par une hyperbole pour condition initiale"""
T1 = 4*(1-q*q*q)/3;"""/pour x=1"""
Tmin = T1*s/math.sqrt(8*mu/s);"""//temps en seconde pour x=1;"""
"""if (temps<Tmin):print("temps trop court. temps minimum = ", Tmin," temps=",temps);return};"""
T0=2*(q*math.sqrt(1-q*q)+math.acos(q));"""//pour x=0, asymptote à x=-1"""
xi= (T0-T)/(T+T0-2*T1); """ //condition initiale"""
eps=1e-15;
n=0;
rl = lancaster(q,xi);
#print("rl",rl)
#print("rl(0)",rl[0])
while ((n<10) and (abs(rl[0]-T)>eps)):
xi-=(rl[0]-T)/rl[1];
rl = lancaster(q,xi);
n +=1;
""" //fin du while,"""
if(n>20 and (abs(rl[0]-T)>eps)):
print("pas de convergence,n=", n, "T-Ti =", T-rl.t);
code = 2;
return code
rl = lancaster(q,xi);
#print("convergence n=",n," x=",xi," ti-T =",rl[0]-T);
y = rl[2];
z = rl[3];
rp1=math.sqrt(2*mu*s)*(q*z*(s-r1)-xi*(s-r2))/(c*r1);
rp2=math.sqrt(2*mu*s)*(-q*z*(s-r2)+xi*(s-r1))/(c*r2);
unsa = 2*(1-xi*xi)/s;"""//2*y*y/s;"""
e2 = (1-r1*unsa)*(1-r1*unsa)+r1*rp1*r1*rp1*unsa/mu;
p = (1-e2)/unsa;
vteta1 = math.sqrt(mu*p)/r1;
vteta2 = math.sqrt(mu*p)/r2;
#print("vteta1,vteta2",vteta1,vteta2)
V1 = Ir1*rp1 + It1*vteta1;
V2 = Ir2*rp2 + It2*vteta2;
#print("Lamb R1,V1,code,e2,p,unsa",R1,V1,code,e2,p,unsa);
kep = carKep(R1,V1,mu);
av2 = kep[5] + teta;
return V1,V2,kep,av2,code
"""fin de lamb"""
if __name__ == "__main__":
print("\ntest de jul2000 et calend2000")
jj = 40+10.5
date = [31.65,10,2024]
print("date",date)
jj = jul2000(date)
print("jj",jj)
date = cal2000(jj)
print("date",date)
jj = jul2000(date)
print("jj",jj)
print("\ntest de lamb")
ua = 150000000.0
R1 = [ua,0,0]
R2 = [0,ua,0]
print("R1=",R1," R2=",R2)
temps = 90*86400
V1,V2,kep,av2,code = lamb(R1,R2,temps,mus)
#print("\nV1,V2,kep,av2,code",V1,V2,kep,av2,code)
orb1 = carKep(R1,V1,mus)
print("\norb1",orb1)
orb2 = carKep(R2,V2,mus)
print("\norb2",orb2)
print("\ntest de carKep/kepCar")
R1 = [ua,0,0]
V1 = [0,30.0,0]
print("\nR1,V1",R1,V1)
orbk = carKep(R1,V1,mus)
print("\norbk",orbk)
pos,vit = kepCar(orbk,mus)
print("\npos,vit",pos,vit)
pass Lire la suite >
Et voici une bibliothèque de Mathématique :
"""Module de mathématique.
modpositif(a,n) retourne le modulo positif
Vnorm(v) retourne la norme du vecteur à 3 dimension
angle(x,y) retourne l'angle polaire du vecteur (x,y) entre 0 et 2*pi
PScect(a,b) produit scalaire de a par b
PDTvect(a,b) produit vectoriel de a par b
quadGauss(npoints,a,b,f): retourne la quadrature de la fonction f entre a et b par la méthode de Gauss
RK4scal(t,y,h,f) intégre la fonction scalaire y'=f(t,y) sur le pas h par la méthode Runge-Kutta à l'orde 4 et retourne le nouvel y
RK4vect(t,y,h,f,nsys):intègr sur le pas h la fonction vectorielle y'=f(t,y) par la méthode Runge-Kutte ordre4 re retourne le nouvel y
zerosc(deb,fin,f,n):recherche de zero de la fonction f(x) entre a et b par dichotomie (section dorée à n coups)
zeroNewton(deb,f,dx,eps,nmax):zéro d'une fonction f(x) par la méthode de Newton avec dérivée numérique
par jeux décalés de dx, jusqu'a la précision eps ou nmax itérations"""
import math
import numpy as np
import numpy.linalg as npl
pi = 3.141592653589793
pi = math.pi;
mut = 398601.3#km3/s2
mus = 132000000000.0#km3/s2
cdr = pi/180
crd = 180/pi
def modpositif(a,n):
"""donne le modulo de a par n toujours positif"""
return ((a%n)+n)%n
def Vnorm(v):
n = len(v);
norm = 0;
for i in range(n):
norm += v[i]*v[i]
return math.sqrt(norm)
def angle(lcos,lsin):
"""retourne l'angle entre 0 et 2*pi du vecteur x,y"""
result = (math.atan2(lsin,lcos)+2*math.pi)%(2*math.pi)
if result<0:
result+=2*pi
return result
def PSvect(a,b):
""" utiliser plutôt np.dot"""
return a[0]*b[0]+a[1]*b[1]+a[2]*b[2]
def PDTvect(a,b):
"""utiliser plutôt np.coss"""
c = [0,0,0]
c[0] = a[1]*b[2]-a[2]*b[1];
c[1] = -a[0]*b[2]+a[2]*b[0];
c[2] = a[0]*b[1]-a[1]*b[0];
return c
def quadGauss(npoints,a,b,f):
"""retourne la quadrature de la fonction f entre a et b par la méthode de Gauss"""
A = (b-a)*0.5
B = (b+a)*0.5
pas=pi/npoints
skk = [0 for i in range(npoints)]
print(skk)
quad = 0
for i in range(npoints):#i va de zero à npoints-1
sk = -math.cos((2*i+1)* pas*0.5)
quad += math.sqrt(1-sk*sk)*f(A*sk+B)*pas
quad *=A
return quad
def RK4scal(t,y,h,f):
"""intégre la fonction scalaire y'=f(t,y) sur le pas h par la méthode Runge-Kutta à l'orde 4 et retourne le nouvel y"""
k1 = h*f(t,y)
k2 = h*f(t+h*0.5,y+k1*0.5)
k3 = h*f(t+h*0.5,y+k2*0.5)
k4 = h*f(t+h,y+k3)
return y+(k1+2*k2+2*k3+k4)/6
def RK4vect(t,y,h,f,nsys):
"""intègr sur un pas h la fonction vectorielle y'=f(t,y) par la méthode Runge-Kutte ordre4 re retourne le nouvel y"""
k1 = [0 for i in range(nsys)]
k2 = [0 for i in range(nsys)]
k3 = [0 for i in range(nsys)]
k4 = [0 for i in range(nsys)]
y1 = [0 for i in range(nsys)]
y2 = [0 for i in range(nsys)]
y3 = [0 for i in range(nsys)]
yf = [0 for i in range(nsys)]
k1 = f(t,y,nsys)
for i in range(nsys):
y1[i] = y[i]+h*k1[i]*0.5
k2 = f(t+h*0.5,y1,nsys)
for i in range(nsys):
y2 [i]= y[i]+h*k2[i]*0.5
k3 = f(t+h*0.5,y2,nsys)
for i in range(nsys):
y3[i] = y[i]+h*k3[i]
k4 = f(t+h,y3,nsys)
for i in range(nsys):
yf[i] = y[i]+(k1[i]+2*k2[i]+2*k3[i]+k4[i])/6
return yf
def zerosc(deb,fin,f,n):
"""recherche de zero de la fonction f(x) entre a et b par dichotomie """
""""par section dorée à n coup"""
nbdor = (1+math.sqrt(5))*0.5-1
a = deb
b = fin
ya = f(a)
if (ya ==0):
return a
yb = f(b)
if (yb == 0):
return b
if (ya*yb>0):
return nan
for i in range(n):
c = a+(b-a)*nbdor
yc = f(c)
if ya*yc>0:
a = c
ya = yc
else:
b = c
yb = yc
return (a+b)*0.5
def zeroNewton(deb,f,dx,eps,nmax):
"""zéro d'une fonction f(x) par la méthode de Newton avec dérivée numérique
par jeux décalés de dx, jusqu'a la précision eps ou nmax itérations"""
a = deb
n = 0
ya = f(a)
while (abs(ya)>eps) and (n<nmax):
#for i in range(10):
yb = f(a+dx)
dya = (yb-ya)/dx
a -= ya/dya
ya = f(a)
n += 1
return a
if __name__ == "__main__":
print("pi=",pi)
print("mut=",mut)
print("mus=",mus)
print("cdr=",cdr)
print("cdr=",crd)
print ("test de modpositif")
a=-7
b=5
print(a,b,modpositif(a,b))
print ("\n test de Vnorm")
v = [2,3,4]
norm1 = Vnorm(v)
print("v, norme de v ",v,norm1)
v = np.array([2,3,4])
print("v, norme de v avec np",npl.norm(v,2))
print("\ntest de ps")
a = [1,3,5];
b = [6,8,9]
print("ps de a,b",PSvect(a,b))
print("avec np.dot",np.dot(a,b))
print("\ntest de PDTvect")
a = [1,3,5];
b = [6,8,9]
print("PDTvect de a,b",PDTvect(a,b))
print("avec np.cross",np.cross(a,b))
print("\ntest de multpilcation par scalaire")
a = [0,1,2,3,4]
l = 2
print("a,l et a*l",a,l,np.multiply(a,l))
print('\n test de angle')
a = math.cos(30*cdr)
b = math.sin(30*cdr)
c = angle(a,b)*crd
print(a,b,c)
print ("\n","test de quadGauss")
def f(var):
return var+1
a=0
b=1
np=10
c = quadGauss(np,a,b,f)
print("quad=","%3.2f" % c,"qvrai=",0.5*b*b+b)
print("\n","test de RK4scal")
t=0
y=0
h=1
def ff(t,y):
return t*t+3*t
c = RK4scal(t,y,h,ff)
print("c=","%3.2f" % c)
print("\n","test de RK4vect")
t=0
h=1
nsys=2
y=[0 for i in range(nsys)]
def fff(t,y,nsys):
yp = [0 for i in range(nsys)]
for i in range(nsys):
yp[i] = t*t
return yp
c = RK4vect(t,y,h,fff,nsys)
print("c=", c)
print("\n test de zerosc(deb,fin,f,n)")
deb = -1
fin = 3
n = 10
def fz(x):
return x-1
c = zerosc(deb,fin,fz,n)
print("c ","%3.2f" % c)
print("\n test de la fonction zeroNewton(deb,f,dx,eps,nmax)")
deb = -1
fin = 3
dx = 1e-3
nmax = 10
eps = 1e-5
def fz(x):
return x-1
c = zeroNewton(deb,fz,dx,eps,nmax)
print("c= ","%3.2f" % c)Dans l'attente que quelqu'un me réponde favorablement.
Lire la suite >
![]()
Lire la suite >
Le 18 mai 2023 à 17:53:57 :
Ça ne sert à rien de up si t'es déjà le premier topic de la liste.
Lire la suite >
1
Sujet :
Code pour une voile solaire [Demande d'aide]