Sujet :
Calculer la position angulaire d'un corps solide "attaché" à un autre corps solide en mouvement
1
A priori je dirais que c'est comme un pendule sauf que tu devrais faire varier la direction de la gravité en fonction de l'accélération du manche.
Donc je commencerais par le pendule >>
https://youtu.be/9iaEqGOh5WM
Lire la suite >
Je viens d’essayer et ça ne marchera pas car la gravité n'est pas considérée comme un vecteur dans cette solution trop simplifiée mais c'est une bonne base.
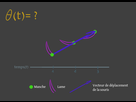
Donc je me suis demandé ou se trouverait le Bob (c'est comme cela qu'il appelle le bout du pendule) après une étape et sans gravité. Je pense qu'on peut dire qu'il sera aligné avec sa précédente position et la nouvelle position du manche, la différence d'angle entre les deux étapes est son accélération angulaire >>>

Pour être sur j'ai fais le même schéma si le manche partait dans l'autre direction et cela pourrait être correcte >>>

Il ne nous reste plus qu'a trouver ce fameux angle.
Lire la suite >
Alors tu as réussi ? De mon côté j'ai un truc pas trop mal mais parfois un comportement erratique, je ne sais pas pourquoi.
https://gph.is/g/EBgzNPK
Lire la suite >
Re, alors, par contre, le plan est en vue aérienne "Tout ça en vu du dessus.", c'est à dire que la gravité n'est pas du haut vers le bas mais du devant vers l'arrière, alors je pense que cette force peut être négligé nan ? J'sais pas si ce que tu as fait prend en compte la gravité dans ce sens, mais ça a l'air correcte hein, ça se rapproche de ce que je veux oui. Par contre ouais, y a quelques amélioration à effectuer, des fois il a un comportement étrange.
De mon côté j'ai un peu réfléchis à la chose et j'ai remarqué que les forces s'effectuent un peu comme ça :

F1> étant le vecteur force lorsque l'on déplace la souris, ce qui correspond à :
F1>(XpositionSouris(t1) - XpositionSouris(t0) ; YpositionSouris(t1) - YpositionSouris(t0))
J'ai observé le comportement dans la vraie vie, et j'ai constaté que si on traine un objet long par l'une des extrémités et bah l'autre extrémité se met dans l'axe de la première, alors F2> est l'opposé de F1> avec comme point d'origine l'autre extrémité. J'ai fait une petite équation à deux inconnus qui permet d'avoir le point d'origine par rapport à la distance entre le point d'origine du manche et le point d'origine de la lame qui est une constante, la position angulaire à t(x). Et j'en suis là, faut encore que je vérifie l'équation, etc... Tout ça pour trouver le point d'origine de l'extrémité de la lame.
Problème : j'ai les vecteurs forces, j'ai la masse des deux corps, j'arrive à calculer les distances parcourus, les vitesses et les accélérations du manche, mais je ne sais pas comment appliquer et simuler la force émise dans l'extrémité de la lame en prenant en compte le fait que la lame est accroché au manche, etc...
En écrivant j'ai eu l'idée d'étudier les petites éoliennes en papier pour ça, peut-être que je pourrais trouver les rapports de forces émis à une hélice pour la faire tourner autour de son axe fixe et l'appliquer avec le vecteur force F2>, ça pourrait fonctionner j'pense.
Donc voilà où j'en suis, j'ai pas avancé depuis, j'ai fais d'autres trucs, mais j'pense que c'est sur la bonne voie.
Sinon, tu as fait comment de ton côté ?
Lire la suite >
Comme j'ai expliqué plus haut. Je suis partis du tuto du pendule, à retrouver ici : https://natureofcode.com/om/book/chapter-3-oscillation/ (aller à 3.9)
J'ai viré tout ce qui était gravité et d'après mon dessin et il ne me restait plus qu'à trouver les orientations du pendule, l'actuelle et celle en fonction de l'accélération de la souris (pas de sa vélocité), de calculer leur différence et d'appliquer cette différence à l'accélération angulaire.
Voici le code pour processing :
Pendulum p;
void setup() {
size(640,360);
//We make a new Pendulum object with an origin location and arm length.
p = new Pendulum(75);
}
void draw() {
background(255);
p.go();
}
class Pendulum {
//Many, many variables to keep track of the Pendulum’s various properties
PVector location; // Location of bob
PVector mouseLoc; // Position de la souris
float r; // Length of arm
float angle; // Pendulum arm angle
float aVelocity; // Angle velocity
float aAcceleration; // Angle acceleration
float damping; // Arbitrary damping amount
PVector mAcceleration; // accélération de la souris
PVector mVelocity; // velocité de la souris
PVector prevMouseLoc; // précédente position de la souris
PVector prevMVelocity; // précédente vélocité de la souris
Pendulum(float r_) {
mouseLoc = new PVector(mouseX, mouseY);
location = new PVector();
r = r_;
angle = 0.0;
aVelocity = 0.0;
aAcceleration = 0.0;
damping = 0.97; //An arbitrary damping so that the Pendulum slows over time
mAcceleration = new PVector(0, 0);
mVelocity = new PVector(0, 0);
prevMouseLoc = new PVector(mouseX, mouseY);
prevMVelocity = new PVector(0, 0);
}
void go() {
update();
display();
}
void update() {
//Update position de la souris
mouseLoc.set(mouseX, mouseY);
//Vélocité de la souris
mVelocity = PVector.sub(mouseLoc, prevMouseLoc);
println("Mouse Vel " + mVelocity.mag());
//Accélération de la souris
mAcceleration = prevMVelocity.sub(mVelocity);
//println("Mouse Acc " + mAcceleration.mag());
////////////////////////////////////////////////
//Formula we worked out for angular acceleration
////////////////////////////////////////////////
//Précédente orientation du pendule (différence entre
// prec position de la souris et précédente position du pendule)
PVector prevDirection = PVector.sub(prevMouseLoc, location);
//Nouvelle orientation (différence entre supposée nouvelle position de la souris
// et précédente position du pendule)
PVector direction = PVector.sub(PVector.add(prevMouseLoc, mAcceleration), location);
//Différence entre les deux orientation appliquée à l'accélération angulaire
aAcceleration = direction.heading() - prevDirection.heading();
//Clamp pour éviter les glitchs
aAcceleration = constrain(aAcceleration, -0.5, 0.5);
//println("Angular acc " + aAcceleration);
////////////////////////////////////////////////
//Standard angular motion algorithm
aVelocity += aAcceleration;
angle += aVelocity;
//Apply some damping.
aVelocity *= damping;
//Where is the bob relative to the origin? Polar to Cartesian coordinates will tell us!
location.set(r*sin(angle),r*cos(angle),0);
location.add(mouseLoc);
//Update previous mouse position and velocity
prevMouseLoc.set(mouseX, mouseY);
prevMVelocity.set(mVelocity.x, mVelocity.y);
}
void display() {
stroke(0);
//The arm
line(mouseLoc.x,mouseLoc.y,location.x,location.y);
fill(175);
//The bob
ellipse(location.x,location.y,16,16);
}
}Lire la suite >
1
Sujet :
Calculer la position angulaire d'un corps solide "attaché" à un autre corps solide en mouvement